La lezione inizia con due descrizioni matematiche equivalenti delle misure:
Le misure generali possono essere descritte da collezioni di matrici, una per ogni esito della misura, in un modo che generalizza la descrizione delle misure proiettive.
Le misure generali possono essere descritte come canali i cui output sono sempre stati classici (rappresentati da matrici densità diagonali).
Ci limiteremo a considerare misure con un numero finito di esiti possibili.
Sebbene sia possibile definire misure con infiniti esiti possibili, queste si incontrano molto meno frequentemente nel contesto del calcolo e dell'elaborazione dell'informazione, e richiedono inoltre della matematica aggiuntiva (la teoria della misura) per essere formalizzate correttamente.
La nostra attenzione iniziale si concentrerà sulle cosiddette misure distruttive, in cui l'output della misura è soltanto un esito classico — senza alcuna specifica dello stato quantistico post-misura del sistema misurato.
Intuitivamente, possiamo immaginare che tale misura distrugga il sistema quantistico stesso, oppure che il sistema venga immediatamente scartato una volta effettuata la misura.
Più avanti nella lezione amplieremo la nostra prospettiva e considereremo le misure non distruttive, in cui esiste sia un esito classico della misura sia uno stato quantistico post-misura del sistema misurato.
Supponiamo che X sia un sistema da misurare, e assumiamo per semplicità che l'insieme degli stati classici di X sia {0,…,n−1} per qualche intero positivo n, in modo che le matrici densità che rappresentano gli stati quantistici di X siano matrici n×n.
In realtà non avremo molto bisogno di fare riferimento agli stati classici di X, ma sarà comodo riferirci a n, il numero di stati classici di X.
Assumeremo inoltre che i possibili esiti della misura siano gli interi 0,…,m−1 per qualche intero positivo m.
Si noti che usiamo questi nomi soltanto per semplicità;
è immediato generalizzare tutto ciò che segue ad altri insiemi finiti di stati classici e di esiti della misura, rinominandoli come desiderato.
Ricordiamo che una misura proiettiva è descritta da una collezione di matrici di proiezione che sommano alla matrice identità.
In simboli,
{Π0,…,Πm−1}
descrive una misura proiettiva di X se ogni Πa è una matrice di proiezione n×n e vale la seguente condizione.
Π0+⋯+Πm−1=IX
Quando tale misura viene eseguita su un sistema X mentre si trova in uno stato descritto da un vettore di stato quantistico ∣ψ⟩, ogni esito a si ottiene con probabilità uguale a ∥Πa∣ψ⟩∥2.
Abbiamo anche che lo stato post-misura di X si ottiene normalizzando il vettore Πa∣ψ⟩, ma per ora ignoriamo lo stato post-misura.
Se lo stato di X è descritto da una matrice densità ρ anziché da un vettore di stato quantistico ∣ψ⟩, possiamo esprimere alternativamente la probabilità di ottenere l'esito a come Tr(Πaρ).
Se ρ=∣ψ⟩⟨ψ∣ è uno stato puro, le due espressioni sono uguali:
Qui utilizziamo la proprietà ciclica della traccia per la seconda uguaglianza, e per la terza uguaglianza il fatto che ogni Πa è una matrice di proiezione, e quindi soddisfa Πa2=Πa.
In generale, se ρ è una combinazione convessa
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
di stati puri, allora l'espressione Tr(Πaρ) coincide con la probabilità media per l'esito a, grazie al fatto che questa espressione è lineare in ρ.
Una descrizione matematica delle misure generali si ottiene rilassando la definizione delle misure proiettive.
In particolare, permettiamo che le matrici della collezione che descrive la misura siano matrici semidefinite positive arbitrarie anziché proiezioni.
(Le proiezioni sono sempre semidefinite positive; possono essere definite alternativamente come matrici semidefinite positive i cui autovalori sono tutti 0 oppure 1.)
In particolare, una misura generale di un sistema X con esiti 0,…,m−1 è specificata da una collezione di matrici semidefinite positive {P0,…,Pm−1} le cui righe e colonne corrispondono agli stati classici di X e che soddisfano la condizione
P0+⋯+Pm−1=IX.
Se il sistema X viene misurato mentre si trova in uno stato descritto dalla matrice densità ρ, allora ogni esito
a∈{0,…,m−1} appare con probabilità Tr(Paρ).
Come è naturalmente richiesto, il vettore delle probabilità degli esiti
(Tr(P0ρ),…,Tr(Pm−1ρ))
di una misura generale forma sempre un vettore di probabilità, per qualsiasi scelta di una matrice densità ρ.
Le seguenti due osservazioni mostrano che questo è effettivamente il caso.
Ogni valore Tr(Paρ) è necessariamente non negativo, in virtù del fatto che la traccia del prodotto di due matrici semidefinite positive qualsiasi è sempre non negativa:
Q,R≥0⇒Tr(QR)≥0.
Un modo per argomentare questo fatto è usare le decomposizioni spettrali di Q e R insieme alla proprietà ciclica della traccia per esprimere la traccia del prodotto QR come una somma di numeri reali non negativi, che è quindi non negativa.
La condizione P0+⋯+Pm−1=IX insieme alla linearità della traccia garantisce che le probabilità sommano a 1.
Supponiamo che X sia un qubit e definiamo due matrici come segue.
P0=(32313131)P1=(31−31−3132)
Entrambe sono matrici semidefinite positive: sono hermitiane e in entrambi i casi gli autovalori risultano essere 1/2±5/6, che sono entrambi positivi.
Abbiamo anche che P0+P1=I, e quindi {P0,P1} descrive una misura.
Se lo stato di X è descritto da una matrice densità ρ ed eseguiamo questa misura, la probabilità di ottenere l'esito 0 è Tr(P0ρ) e la probabilità di ottenere l'esito 1 è
Tr(P1ρ).
Ad esempio, se ρ=∣+⟩⟨+∣ le probabilità per i due esiti 0 e 1 sono le seguenti.
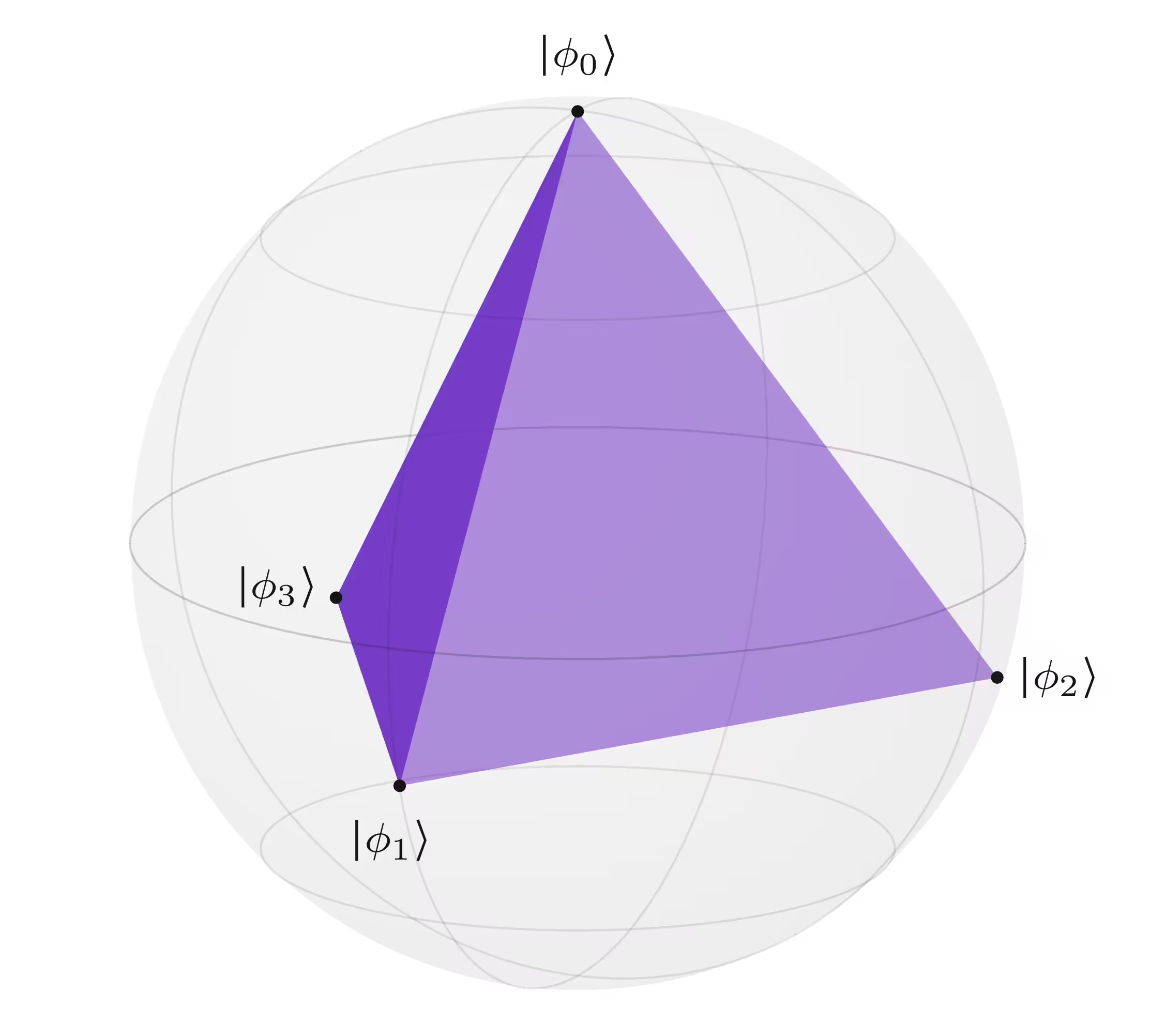
Questi quattro stati sono perfettamente distribuiti sulla sfera di Bloch, ciascuno equidistante dagli altri tre e con gli angoli tra qualsiasi coppia di essi sempre uguali.
Definiamo ora una misura {P0,P1,P2,P3} di un qubit ponendo Pa come segue per ogni a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Possiamo verificare che questa è una misura valida come segue.
Ogni Pa è evidentemente semidefinita positiva, essendo uno stato puro diviso per un mezzo.
Cioè, ognuna è una matrice hermitiana con un autovalore uguale a 1/2 e tutti gli altri autovalori nulli.
La somma di queste matrici è la matrice identità: P0+P1+P2+P3=I.
Le espressioni di queste matrici come combinazioni lineari di matrici di Pauli rendono questa verifica immediata.
Un secondo modo per descrivere le misure in termini matematici è come canali.
L'informazione classica può essere vista come un caso speciale dell'informazione quantistica, nella misura in cui possiamo identificare gli stati probabilistici con le matrici densità diagonali.
Quindi, in termini operativi, possiamo pensare alle misure come canali i cui input sono matrici che descrivono gli stati del sistema misurato e i cui output sono matrici densità diagonali che descrivono la distribuzione risultante degli esiti della misura.
Vedremo a breve che qualsiasi canale con questa proprietà può sempre essere scritto in una forma semplice e canonica che si ricollega direttamente alla descrizione delle misure come collezioni di matrici semidefinite positive.
Viceversa, data una misura arbitraria come collezione di matrici, esiste sempre un canale valido con la proprietà dell'output diagonale che descrive la misura data come suggerito nel paragrafo precedente.
Mettendo insieme queste osservazioni, troviamo che le due descrizioni delle misure generali sono equivalenti.
Prima di procedere, siamo più precisi riguardo alla misura, a come la stiamo vedendo come canale e alle assunzioni che stiamo facendo.
Come prima, supponiamo che X sia il sistema da misurare e che i possibili esiti della misura siano gli interi 0,…,m−1 per qualche intero positivo m.
Sia Y il sistema che memorizza gli esiti della misura, quindi il suo insieme di stati classici è {0,…,m−1}, e rappresentiamo la misura come un canale Φ da X a Y.
La nostra assunzione è che Y sia classico — ovvero che, indipendentemente dallo stato iniziale di X, lo stato di Y che otteniamo sia rappresentato da una matrice densità diagonale.
Possiamo esprimere in termini matematici che l'output di Φ è sempre diagonale nel modo seguente.
Prima definiamo il canale completamente defasante Δm su Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Questo canale è analogo al canale qubit completamente defasante Δ della lezione precedente.
Come mappa lineare, azzera tutti gli elementi fuori diagonale di una matrice in input e lascia invariata la diagonale.
Ora, un modo semplice per esprimere che una data matrice densità σ è diagonale è tramite l'equazione
σ=Δm(σ).
In parole, azzerare tutti gli elementi fuori diagonale di una matrice densità non ha effetto se e solo se gli elementi fuori diagonale erano già tutti nulli.
Il canale Φ soddisfa quindi la nostra assunzione — che Y sia classico — se e solo se
Φ(ρ)=Δm(Φ(ρ))
per ogni matrice densità ρ che rappresenta uno stato di X.
Quindi, per queste stesse matrici P0,…,Pm−1 possiamo esprimere il canale Φ come segue.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Questa espressione è consistente con la nostra descrizione delle misure generali in termini di matrici, poiché vediamo che ogni esito della misura appare con probabilità Tr(Paρ).
Osserviamo ora che le due proprietà richieste alla collezione di matrici {P0,…,Pm−1} per descrivere una misura generale sono effettivamente soddisfatte.
La prima proprietà è che siano tutte matrici semidefinite positive.
Un modo per vederlo è osservare che, per ogni vettore ∣ψ⟩ con componenti in corrispondenza con gli stati classici di X, abbiamo
Il trasposto di ogni Pa viene introdotto per la terza uguaglianza perché
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Questo permette alle espressioni ∣b⟩⟨b∣ e ∣c⟩⟨c∣ di comparire, che si semplificano alla matrice identità sommando rispettivamente su b e su c.
Per l'assunzione che P0,…,Pm−1 siano semidefinite positive, lo sono anche P0T,…,Pm−1T.
In particolare, il trasposto di una matrice hermitiana è ancora una matrice hermitiana, e gli autovalori di qualsiasi matrice quadrata e del suo trasposto coincidono sempre.
Ne consegue che J(Φ) è semidefinita positiva.
Tracciando fuori il sistema di output Y (che è il sistema a destra) si ottiene
Supponiamo di avere più sistemi che si trovano collettivamente in uno stato quantistico, e che una misura generale venga eseguita su uno dei sistemi.
Questo produce uno degli esiti della misura, selezionato casualmente secondo le probabilità determinate dalla misura e dallo stato del sistema prima della misura.
Lo stato risultante dei sistemi rimanenti dipenderà in generale da quale esito della misura è stato ottenuto.
Esaminiamo come funziona per una coppia di sistemi (X,Z) quando il sistema X viene misurato.
(Chiamiamo il sistema a destra Z perché prenderemo Y come sistema che rappresenta l'output classico della misura quando la vediamo come canale.)
Possiamo poi generalizzare facilmente alla situazione in cui l'ordine dei sistemi è invertito, nonché al caso di tre o più sistemi.
Supponiamo che lo stato di (X,Z) prima della misura sia descritto da una matrice densità ρ, che possiamo scrivere come segue.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
In questa espressione assumiamo che gli stati classici di X siano 0,…,n−1.
Assumiamo che la misura sia descritta dalla collezione di matrici
{P0,…,Pm−1}.
Questa misura può essere descritta alternativamente come un canale Φ da X a Y, dove Y è un nuovo sistema con insieme di stati classici {0,…,m−1}.
In particolare, l'azione di questo canale può essere espressa come segue.
Stiamo considerando una misura del sistema X, quindi le probabilità con cui si ottengono i diversi esiti della misura possono dipendere solo da ρX, lo stato ridotto di X.
In particolare, la probabilità per ogni esito a∈{0,…,m−1} di apparire può essere espressa in tre modi equivalenti.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
La prima espressione rappresenta naturalmente la probabilità di ottenere l'esito a in base a quanto già sappiamo sulle misure di un singolo sistema.
Per ottenere la seconda espressione usiamo semplicemente la definizione ρX=TrZ(ρ).
Per ottenere la terza espressione è necessaria più riflessione — e si invitano i lettori a convincersi che sia vera.
Ecco un suggerimento: l'equivalenza tra la seconda e la terza espressione non dipende dal fatto che ρ sia una matrice densità o che ogni Pa sia semidefinita positiva. Prova a dimostrarlo prima per prodotti tensoriali della forma ρ=M⊗N e poi concludi che deve essere vero in generale per linearità.
Sebbene l'equivalenza tra la prima e la terza espressione nell'equazione precedente possa non essere immediata, ha senso.
Partendo da una misura su X, stiamo effettivamente definendo una misura di (X,Z), dove semplicemente scartiamo Z e misuriamo X.
Come tutte le misure, questa nuova misura può essere descritta da una collezione di matrici, e non sorprende che questa misura sia descritta dalla collezione
Se vogliamo determinare non solo le probabilità dei diversi esiti ma anche lo stato risultante di Z condizionato a ogni esito della misura, possiamo ricorrere alla descrizione della misura come canale.
In particolare, esaminiamo lo stato che otteniamo applicando Φ a X e non facendo nulla a Z.
Si noti che questa è una matrice densità in virtù del fatto che Φ è un canale, quindi ogni matrice
TrX((Pa⊗IZ)ρ) è necessariamente semidefinita positiva.
Un ultimo passaggio trasforma questa espressione in una che rivela ciò che stiamo cercando.
Questo è un esempio di stato classico-quantistico,
a=0∑m−1p(a)∣a⟩⟨a∣⊗σa,
come abbiamo visto nella lezione sulle Matrici densità.
Per ogni esito della misura a∈{0,…,m−1}, abbiamo con probabilità
p(a)=Tr((Pa⊗IZ)ρ)
che Y si trova nello stato classico ∣a⟩⟨a∣ e Z si trova nello stato
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Ovvero, questa è la matrice densità che si ottiene normalizzando
TrX((Pa⊗IZ)ρ)
dividendola per la sua traccia.
(Formalmente, lo stato σa è definito solo quando la probabilità p(a) è non nulla;
quando p(a)=0 questo stato è irrilevante, poiché fa riferimento a un evento discreto che si verifica con probabilità zero.)
Naturalmente, le probabilità degli esiti sono consistenti con le nostre osservazioni precedenti.
In sintesi, ecco cosa accade quando la misura {P0,…,Pm−1} viene eseguita su X quando (X,Z) si trova nello stato ρ.
Ogni esito a appare con probabilità p(a)=Tr((Pa⊗IZ)ρ).
Condizionato all'ottenimento dell'esito a, lo stato di Z è rappresentato dalla matrice densità σa mostrata nell'equazione (2), che si ottiene normalizzando TrX((Pa⊗IZ)ρ).
Possiamo adattare questa descrizione ad altre situazioni, ad esempio quando l'ordine dei sistemi è invertito o quando ci sono tre o più sistemi.
Concettualmente è immediato, sebbene scrivere le formule possa diventare laborioso.
In generale, se abbiamo r sistemi X1,…,Xr, lo stato del sistema composto (X1,…,Xr) è ρ, e la misura {P0,…,Pm−1} viene eseguita su Xk, accade quanto segue.
Ogni esito a appare con probabilità
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Condizionato all'ottenimento dell'esito a, lo stato di (X1,…,Xk−1,Xk+1,…,Xr) è rappresentato dalla seguente matrice densità.